Magnetorheological fluids in vehicle seat suspensions
The damping of vehicles generally relies on three components: tyre, suspension and seats. Changes in the seating system have the least impact on the performance of other vehicle components, and the manufacturing has the advantages of short cycle time, quick results and ease of operation, so the research and improvement of off-road vehicle seating performance has become the most realistic and feasible solution to improve vehicle driving comfort. Of the three support surfaces of the seat cushion, backrest and floor, the human body is most sensitive to vertical vibrations, so vertical vibrations are a major research priority. The vehicle suspension is mainly composed of 3 parts: the elastic element, the damping element and the guiding mechanism. According to its damping control method, it can be divided into passive suspension, active suspension and semi-active suspension. Seat suspensions have many similarities to vehicle suspensions, so they can be discussed through the framework of vehicle suspensions. As with vehicle suspensions, seat suspensions are also divided into three types: passive, active and semi-active, and their simplified models are shown in Figure 1.
Passive suspension: In the early days the driver’s seat had no elastic elements and the seat suspension was rigidly connected to the vehicle floor. Spring and damping elements are typical of the passive seat suspension structure. This type of seat is simple and inexpensive but not very comfortable. The weighted acceleration values on the seat are 2.2 to 3.5 m/s2. This knotted seat has limited vibration isolation and sometimes amplifies the vibration intensity. The general seat suspension is mechanical, mostly equipped with springs and dampers, and its simplified model is shown in Figure 1a. There is no energy supply in the passive seat suspension, the springs are mainly used to carry static loads, the dampers are mainly used to control the response characteristics, the elasticity and damping coefficients cannot be adjusted in time, so the passive suspension can only be designed to adapt to a certain road surface. When there is an external excitation, this seat can only respond passively and the damping performance is very poor.
Active suspension: A simplified model of an active control suspension is shown in Figure 1b, which has the elastic and damping elements of a passive suspension with the addition of a force generator (shown in 2 in Figure 1b). Based on the feedback information generated by the speed and acceleration signals, the active control calculates online according to certain control laws to obtain the optimum control force, and then applies a controllable force through the electronic control unit and the force generator to control the response characteristics of the seat vibration system, which has an ideal damping effect. The active suspension can achieve the optimal feedback control of the system according to the road excitation and the actual situation of the vehicle operation, and its vibration damping effect is very ideal. Active suspension systems are usually available in two forms, namely motor-driven air suspension and solenoid-driven oil-air suspension. However, due to their high cost and energy consumption, they are currently only used in premium cars.
Semi-active suspensions: Semi-active seat suspensions are seat suspensions that can suppress vibrations by inputting a small amount of external energy and adjusting the relevant suspension parameters (spring stiffness coefficient or damper damping coefficient) appropriately to the external conditions within a certain range. A simplified model of a semi-active suspension is shown in Figure 1c, which consists of an adjustable elastic element (spring) and a damping element (damper). The basic principle is that when ground excitation is generated, the seat will also vibrate, and the velocity and acceleration response of the mass on the spring M relative to the wheel will generate feedback signals, which are transmitted to the controller by the acceleration sensor 1, the controller outputs the appropriate control current for the magnetorheological dampers in accordance with certain control laws and signal conversions, thereby regulating the stiffness of the adjustable springs and the damping force of the adjustable dampers2. The semi-active suspension is similar to the passive suspension in terms of how the damping force is generated, except that the semi-active suspension has a variable damping or stiffness coefficient. Compared to passive suspensions, active suspensions are highly adaptive. However, active suspensions cannot be popularised due to their complex structure, high price and excessive energy consumption, and are currently only used in high-grade models. Semi-active suspensions have no external input, low energy consumption and cost, rapid response, easy operation, good damping effect and high reliability, therefore, semi-active suspensions have been widely used in vehicle damping systems and have good application prospects.
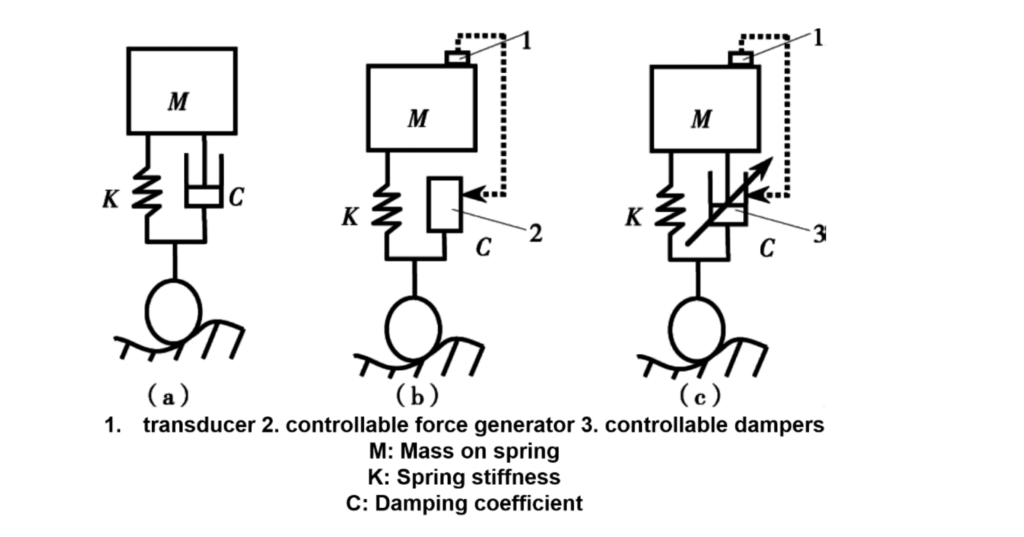
Fig 1 Three simplified models of seat suspensions
Table 1 lists a comparison of the characteristics of the three types of suspension, the table can be found, active seat suspension is the most effective method of vehicle seat vibration damping, but in the actual production process must be considered commercial factors, active suspension energy consumption, force generator structure is complex leading to high manufacturing costs, so the active suspension can not be popular and applied. The semi-active suspension, while effectively solving the problem of damping and vibration isolation of vehicle seats, has the characteristics of cheap and simple structure, combining the main advantages of both active and passive suspensions, the semi-active suspension is the first choice of vehicle manufacturers in the selection of models.
Table 1 Comparison of the characteristics of the three seat suspensions
| Suspension type | Passive suspension | Semi-active suspension | Active suspension | ||
| Discrete control | Continuous control | Slow active | Fully active | ||
| Adjustment elements | Normal damping | Graded controlled damping | Continuously controlled damping | Hydraulic system | |
| Principle of action | Damping non-adjustable | Damping graded | Damping continuously adjustable | Body-axle forces | |
| Control mode | None | Manual adjustment | Electro-hydraulically controlled automatic adjustment | Electro-hydraulically controlled automatic adjustment | |
| Automatic adjustment | |||||
| Frequency range | None | 0~10Hz | 0~20Hz | 3~6Hz | <15Hz |
| Improvement of vertical vibration characteristics | Very little | Little | Medium | Large | Large |
| Energy consumption | None | Little | Little | Medium | Large |
| Manufacturing costs | Very little | Little | Medium | Large | Large |
Magnetorheological fluids (MRFs) are controlled fluids that can undergo dramatic changes in their viscosity, plasticity and other fluid properties under the influence of a magnetic field. The fluid exhibits Newtonian fluid properties of low viscosity and high fluidity in the absence of an applied magnetic field, and Bingham body properties of high viscosity and low fluidity in the presence of a strong magnetic field. This transformation is non-polar, continuous and reversible, and the magnetorheological fluid has response times of milliseconds under magnetic fields, allowing for real time active control of machinery. The Magnetorheological Fluid Damper (MRD) is a new type of semi-active control device for vehicles based on the rapid and reversible rheological changes of magnetorheological fluids in magnetic fields of different strengths. The MRD works on the principle that under the action of an applied magnetic field, the randomly distributed magnetic dipoles in the MRF will overcome the thermal motion and move in the direction of the magnetic field, which causes the magnetic polarised particles to link together and form a long chain or mesh structure, thus turning the MRF into a semi-solid, changing its flow characteristics and thus changing the pressure difference between the two ends of the MRD damping channel to achieve the effect of changing the damping force. The seat suspension and damping control system consists of the seat, displacement sensor, acceleration sensor, signal amplification conditioning circuit, DSP control system, current driver, magnetorheological damping damper and seat suspension mechanism, etc. The overall design process is shown in Figure 2. Firstly, the acceleration sensor and the displacement sensor collect the acceleration signal of the vertical vibration of the seat and the relative displacement signal between the chassis and the seat respectively. These signals are amplified, rectified and filtered by an amplification and conditioning circuit and fed to the DSP control system, which converts the processed signals to A/D and processes the converted data again to obtain the output control signal, this controls the switching of the MOS-FET tubes in the current driver, which in turn provides the most suitable control current for the magnetorheological fluid damping damper.
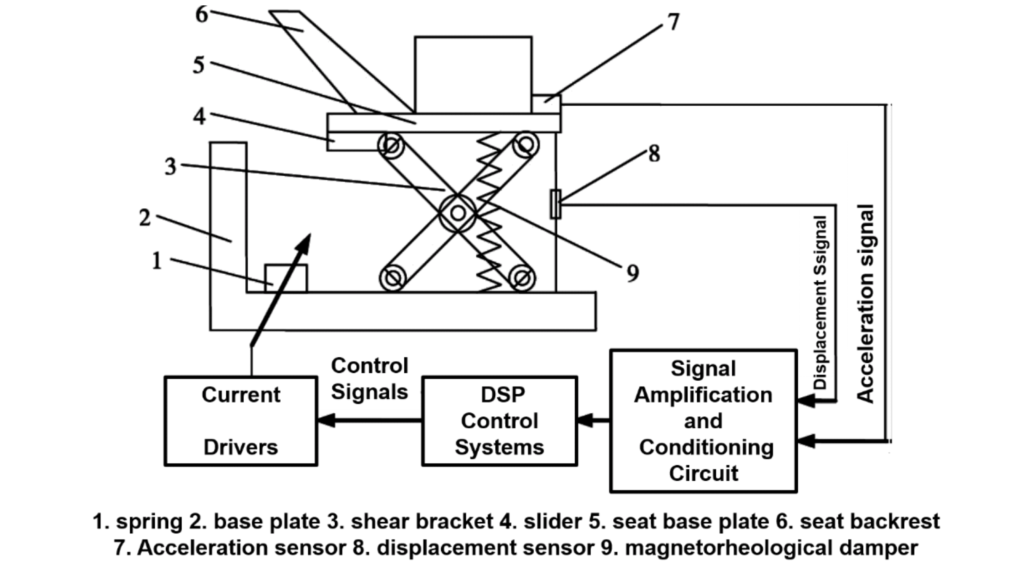
Fig 2 Overall design of the seat damper
The semi-active seat suspension based on magnetorheological technology has the advantages of low power consumption, small size, wide frequency response, high damping force, large adaptability, wide dynamic range and active control, which will have a broad application prospect in the future seat damping market.