Magnetorheological fluids in prosthetics
The use of the lower limbs for locomotion is an important activity in human production and life, but data from the Second Disability Sample shows that hundreds of thousands of people worldwide are forced to have their lower limbs amputated every year due to various accidents. Amputations of the lower limbs leave amputees without basic mobility on the one hand and suffer from the pain of amputation on the other hand. The number of patients with physical disabilities has increased significantly in recent years due to traffic accidents and natural disasters, but the current level of medical care does not allow for the regeneration of limbs and therefore there is an urgent need to develop an intelligent prosthetic knee joint to help patients with lower limb disabilities to walk. The knee joint, as the main functional component of the prosthetic mechanism, is not only the decisive criterion for the performance and longevity of the prosthesis, but is also a key component of the movement of the lower limb when the patient wears the prosthesis, directly determining the smoothness and aesthetics of the limb’s movement. Although many researchers have explored the development of prosthetic materials, such as high-performance stainless steel, titanium alloy, carbon fibre composites and mechanical design (mainly consisting of multi-degree-of-freedom kinematics), most of the prosthetic knee joints developed have generally performed poorly due to technical and other constraints in the early stages. However, due to technical and other constraints, most of the prostheses developed were generally poor in performance and, when worn by patients with lower limbs, had very unnatural coordination of movement and strained walking, making it difficult to achieve normal limb function. With the rapid development of biomedical technology, materials development and microelectronics technology, great progress has been made in the development of prosthetic knee joints, and new intelligent prostheses are gradually replacing traditional prostheses. This has become a new direction of development in the field of rehabilitation medicine. Currently, there are three main types of knee mechanisms based on the way the knee joint works and the different drive modules. At present there are three main types of knee mechanisms.
- The active knee mechanism, which was the focus of early research, uses a motor-driven joint motion mechanism to achieve an arbitrary gait trajectory; however, this knee mechanism is more energy intensive and the patient’s walking speed is limited, which differs significantly from the normal human leg mechanism.
- Passive knee mechanisms, which are entirely passively controlled and also require subjective control by the operator to provide energy, although their structure is relatively simple and mostly consists of completely passive components such as air, hydraulic cylinders and springs, the gait trajectory of the patient during walking is relatively homogeneous, and the control accuracy is poor when the mechanism is subjected to alternating loads and is not facilitate rapid walking.
- Semi-active knee mechanism, which has the advantage of consuming less energy, also ensures that the transient trajectory curve of the patient’s gait during walking highly compatible with the transient trajectory curve of normal human movement, which also ensures freedom of speed and coordinated aesthetics of walking1.
With the increasing demands on prosthetic performance, the research hotspot for prosthetic knee joints has gradually shifted from active and passive types to semi-active intelligent prosthetic knee joints. Magnetorheological damped prosthetic knee joints with semi-active controlled damping function have the advantages of both active and passive prosthetic knee joints and will become the ideal choice for lower limb patients. A magnetorheological fluid with controlled damping effect is used as the working medium of the magnetorheological damped knee mechanism, which mainly consists of a suspension of non-magnetic carrier fluid, highly permeable particles and additives. Under zero magnetic field, the magnetorheological fluid appears as a free-flowing Newtonian fluid, but under the action of the magnetic field, its viscosity changes with the magnetic field strength and it appears as a Bingham fluid, and this phase change can be milliseconds, and once the magnetic field disappears, it becomes a free-flowing fluid again. Its mechanical properties can be regulated by electric current and it can be used at low voltages (around a few volts) with good safety features. Thus, based on the magnetorheological fluid effect, a controlled damping magnetorheological fluid damper is ideal as an actuating element for knee mechanisms. As the core component of the magnetorheological damped knee mechanism, the mechanical properties of the magnetorheological fluid damper are closely related to the applied magnetic field and the shear gap. The magnetic circuit of the damper is designed to take into account the magnetic field strength that can be generated by the coil and the magnetic field strength required to meet the shear yield strength of the magnetorheological fluid; the shear gap is generally designed to be 1 to 2 mm due to process constraints. The magnetorheological knee joint is required to perform complex movements such as fast walking, running and walking up stairs, which require a large range of adjustable damping forces to meet the output damping force beyond the uncertain applied load.
As shown in Figure 1, a conceptual diagram of a magnetorheological damper-based prosthesis is shown. Based on the actual motion of the joint, the motion of the prosthesis is divided into a support phase and an oscillation phase, and when the prosthesis is in the support phase, the damper needs to provide sufficient support, and when the prosthesis is in the oscillation phase, the damper needs to reduce the resistance so that the hem of the prosthesis can bend freely. The damping force of conventional dampers cannot be adjusted in real time. If the damping force is not sufficient, the prosthesis cannot be supported upright, and if the damping force is too high, the prosthesis cannot be flexibly bent, therefore most of the smart prostheses on the market cannot be flexibly bent and walked or even jumped. The magneto-rheological dampers can be adjusted by adjusting the current level of the internal magnetic core, thus changing the strength of the magnetic field through the liquid orifice and further adjusting the damping force of the magneto-rheological dampers. The damping force is linearly related to the current and can be easily controlled. When the prosthesis is in the support phase, the magnetorheological damper is supplied with the maximum current to achieve the maximum resistance to provide better support. As the prosthesis changes from the support phase to the oscillating phase, we gradually reduce the current so that the resistance of the damper slowly decreases, allowing it to maintain support while being flexible. As the Smart Prosthesis changes from the oscillating phase to the supporting phase, the current is gradually increased again to bring the support back to maximum.
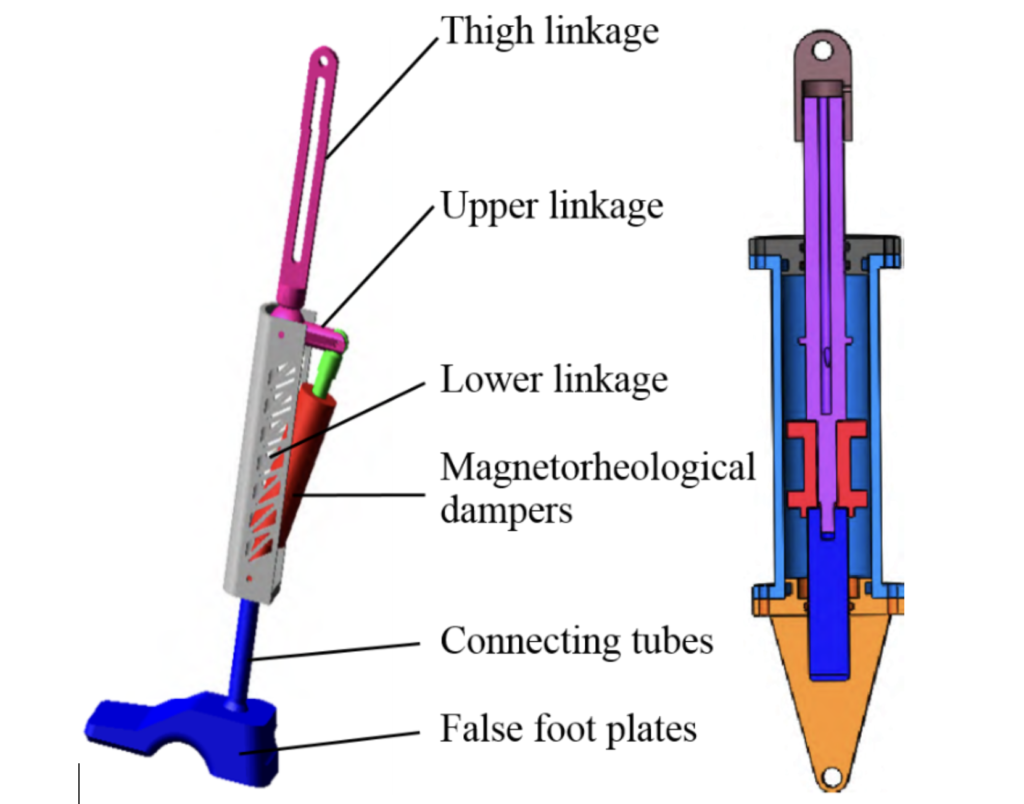
Fig 1 Conceptual diagram of magnetorheological prostheses